The Robot Operating System 2
ROS, from the date of its release, has been ubiquitously deployed in a variety of applications ranging from space robots to educational robots. Neobotix is a huge supporter of open-source packages and for several years now, ROS has been the integral core component of all our products. All our ROS based products work seamlessly and have played a major part both in industries and as well as in research contributions. ROS 2 is the next leap for the ROS Community, that provides various advantages compared to its predecessor ROS. Along with the community, we have already migrated all our packages to ROS 2.
We currently support the ROS 2 distribution Humble.
What happens to ROS?
Currently, we plan to continue our ROS support until EOL, that is dated for the year 2025. For the case of ROS 2, we will be supporting all the LTS distributions and rolling distributions on demand from our customers.
Some of the advantages that ROS 2 provide
- Lifecycle nodes, that allow you to set different states for the process or the application that is intended.
- Nodes are not dependent on ROS Master anymore, rather each node has the capability to find the other nodes.
- Unlike ROS, ROS 2 can be installed on Ubuntu, MacOS and Windows 10.
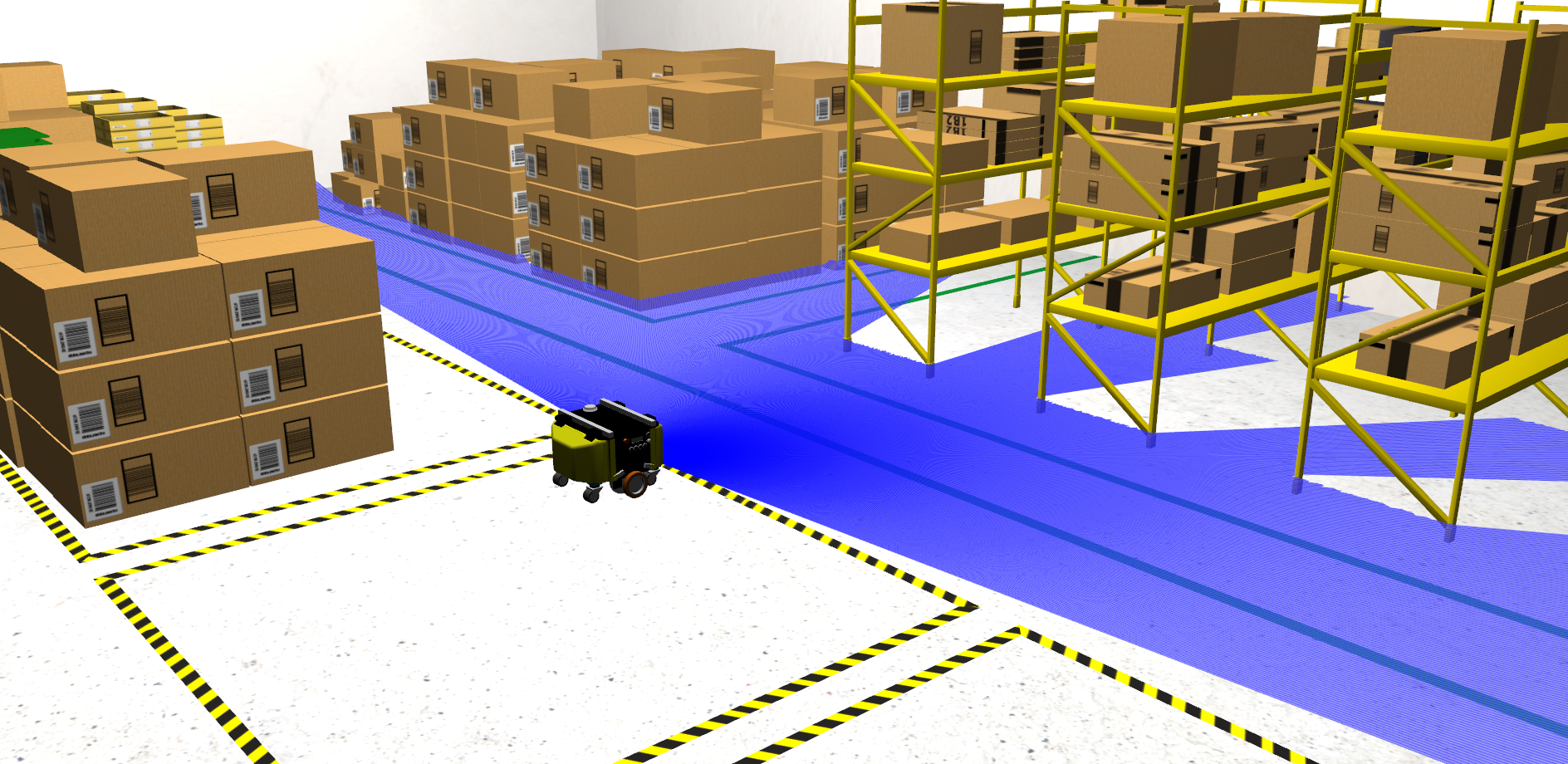
Simulation
After the immense support given to neo_simulation, we have now developed its successor, which is named as neo_simulation2. The all new simulation package neo_simulation2, comes along with all the new ROS 2 features. Like its predecessor, neo_simulation2 package is fully equipped with all the Neobotix robots that is available in the market. By combining the novelty of ROS 2 and the state-of-the-art Neobotix platforms will allow the users to learn and develop various reliable and robust application that caters their needs in both the research and as well as in industries.
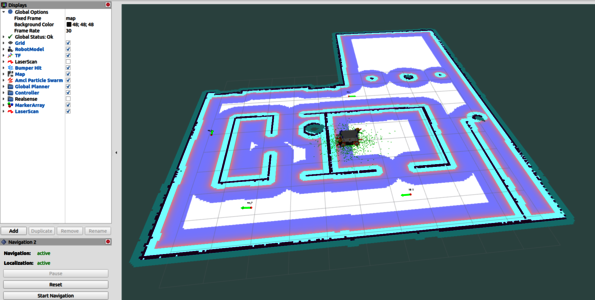
Navigation
We have also integrated the all new navigation-stack Nav 2 with our robots, enabling you to deploy new features such as the behaviour trees and setting mutiple goal location for your robot. Apart from that, Nav 2 provides with all new planners and controllers such as hybrid planner, SMAC Planner and the DWB Controller.


This package can be activated monthly at any time and includes extensive support and other benefits.


If you need unique features or customisations for your application, we can develop and implement them for you.
Which AMR Software to Use?
When to use ROS 2?
If a unique robot (proof of concept, test, demo, ...) is to be developed that is not meant to be used productively or duplicated.
If many completely new functions are to be developed in-house or completely new components are to be integrated.
When the project is primarily about developing and learning.
When availability, ease of operation and efficiency are less relevant.
When is PlatformPilot better suited?
If the robot is to work productively in the long term, especially if the application is to be expanded in the future.
When proven functions and components are to be combined to form a new whole.
When reliability and professional support are paramount.
When not every detail needs to be accessible and modifiable.