The Robot Operating System - ROS
The Robot Operating System, better known as ROS, is an open source framework for autonomous robots of all kinds. A huge international community of robotics developers is working on both improving the framework itself as well as constantly creating new functions, packages and modules.
ROS has grown to be the most widely used standard for controlling autonomous robots. Starting out as a tool for universities and research institutes, ROS now has already made its mark in industrial applications as well.
We currently support the ROS distribution Noetic.

Always up to date
ROS thrives on the continuous interaction and exchange of ideas within the developers' community. The framework's core concept is the ease of replacing existing nodes with new and improved or customised versions. This includes basics like sensor interfaces and device drivers but also advanced features such as 3D mapping or dynamic path planning.
Device manufacturers, system integrators, researchers and private developers all contribute to ROS. This creates and maintains a vast set of tools and possibilities, freely available as open source packages for others to use. Most developers use this existing foundation because it helps them save precious time and focus on creative work. Their results are then made available to other ROS users. This way ROS is always up to date and the best way to get your hands on the latest cutting-edge algorithms.
Of course Neobotix is also part of the development efforts and present on GitHub and on ros.org.

Full support for Neobotix hardware
ROS is a core component of all Neobotix products. Both complete mobile robots and separate components can be used with ROS.
All our robots are delivered with a basic ROS installation and ready for use. This includes all drivers and hardware related nodes as well as reliable packages for creating maps of the environment, for localisation and path planning.
Optional components, like the popular USBoard, can be integrated seamlessly into the robots. They can also be operated as stand-alone devices or be integrated in your own project.
Quick testing in a detailed simulation
You can use our extensive and easy to use simulation packages for drafting your project and for developing and offline testing of new software modules.
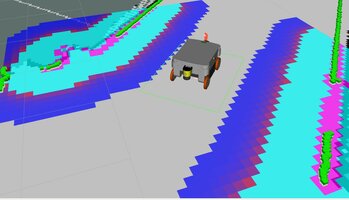
Beside very detailed 3D robot models these packages also contain realistic worlds and a preconfigured and easy to adjust navigation setup. You can create maps based on simulated sensor output and let the virtual robot explore its environment.
This will give you a good insight into our robots and their capabilities. You can find out how they react to obstacles and changes in the environment and can also experiment with your own modifications.

Online tests with the ROS Development Studio
The ROS Development Studio offers the easiest way to test our mobile robots under ROS and get a first impression of their potential.
A guest account is perfect for initial tests and offers many advantages:
- Work with Neobotix robots free of charge
- No time consuming ROS installation
- No client required - work directly in your web browser
- Many helpful tutorials and online courses